Tuan Dang
University Texas at Arlington
Email: tuan.dang@uta.edu
Portfolio
3D object real-time registration
Multi-view real-time registration using Kernel Density Estimation

Robot Self-calibration for 3D object manipulation
Robot self-calibration in 3D with camera system without using ground-truth like check-board.
Deformable Objects Recognition
Building 3D custom dataset and ConvNet to recognize 3D model from the real-world.
PerFC
Software framework for cumtomzied baxter robots using Mobility base, 5 color cameras, 1 RGB-D Camera, LIDAR. Tasks recognition, pick and place, map building,...

IoTree
Batery-free Tree monitoring system using Bio Sensor and Long-range communication

Moving Magnet Controller
Moving Magenet Controller with Python-based user interactive languague
Single Controller for Mulitple Robots with Synchronization
Single Robot controller for multiple robots (Scara, Puma, ect,..) with Synchorinization.
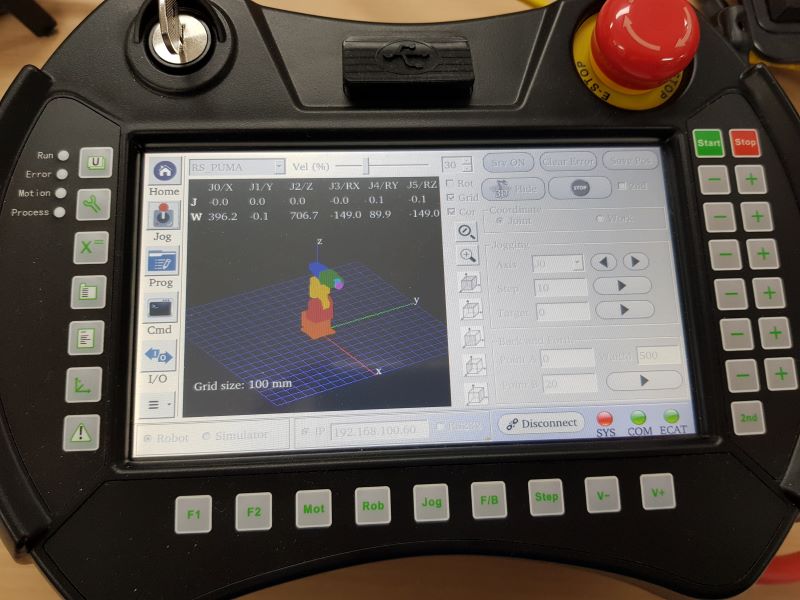
Teaching Pendant 7 inches - TP7
A touching based Teaching Pendant that is used to teach robot works. It written in C++ with hardware powered in pure Linux (kernel only, without GUI likes Ubuntu or Fedora,...). The project's challenge is to re-create GUI from scratch on the top of Linux system call. This is because TP7 uses low-end CPU and need to reponse to quick user's behaviors. It also supports 3D view under OpenGL ES 3.0 core profile API.

Teaching Pendant Simulator for Windows
A software that simulates Teaching Pendant 7 inches on Windows PC so that user can play around with functions of TP before deciding to buy it.
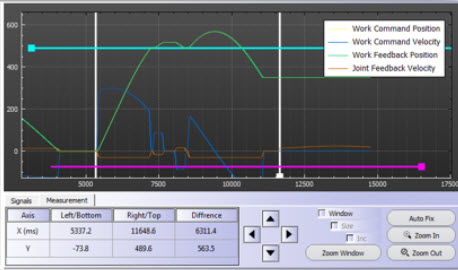
Oscilloscope
This scope connects to controller via TCP/IP to acquire the real-time raw data and view with many analysis functionalities like physical Oscilloscope.

Teaching Pendant 3.5 inches
This low-end Teaching Pendant and written in pure C on MCU Coretex M4 (STM32F429, 180MHz, 256KB RAM) with TFT 320x240 LCD.
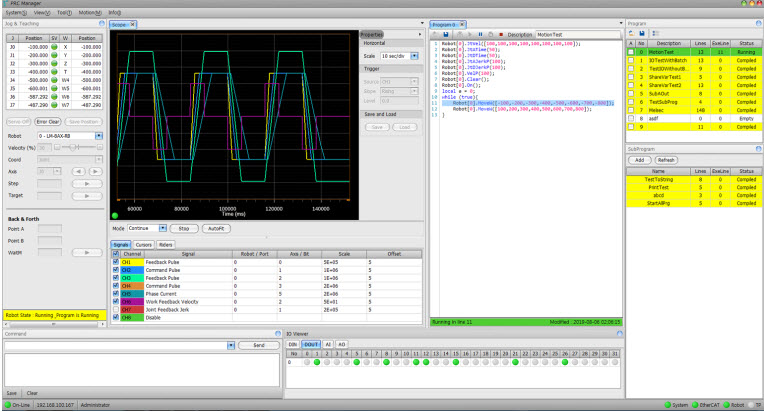
GUI PC for Robot Controller
This software give user the first hand to work with robot controller in Visual Studio-like Windows environment.
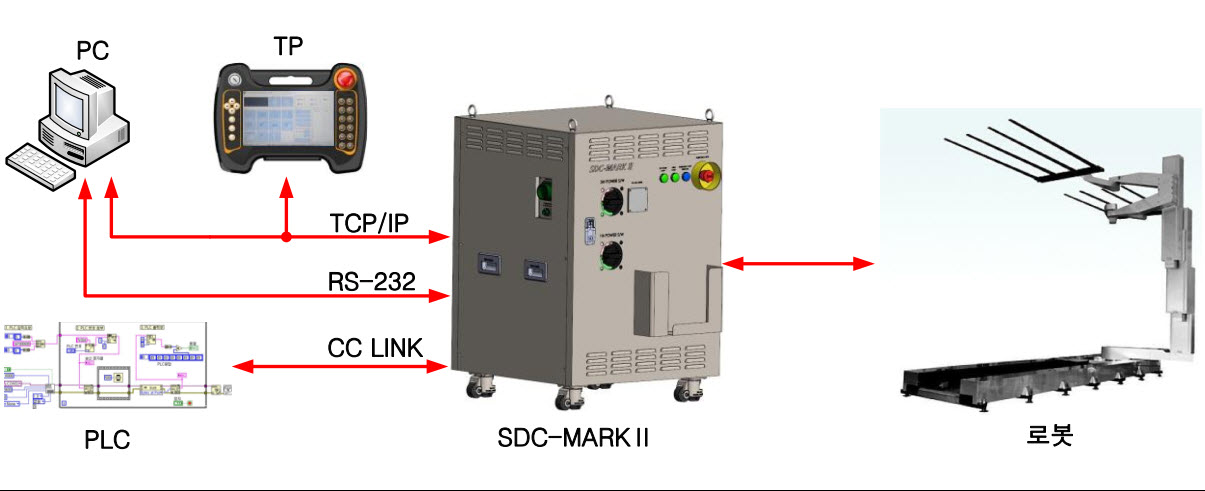
Samsung SDC Mark-III
Robot Controller for Samsung SDC project that uses EtherCat technology.
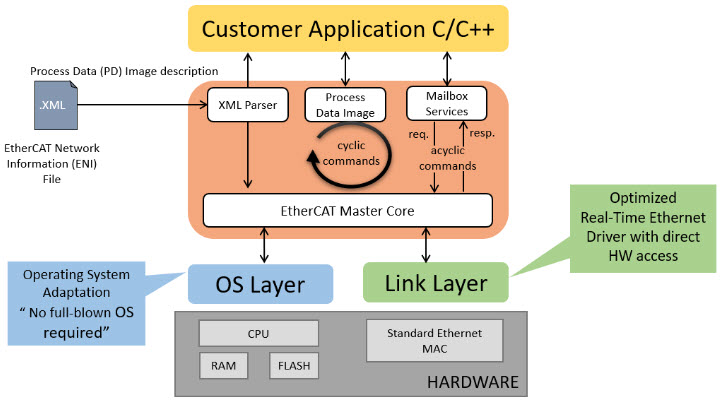
Acontis EcMaster Porting
My work is to port EcMaster stack with different Operating System (VxWorks, RT Linux, Xenomai, TI SYS/BIOS, Hypervior - Linux in Windows (LxWin), On-time OS 32 in Win (EcWin)) and different CPU architecture (x86, x64, ARM7, ARM15), then make demo application for support customers like Samsung, Hyundai, Hanwha, Fastech, AjinTech,...
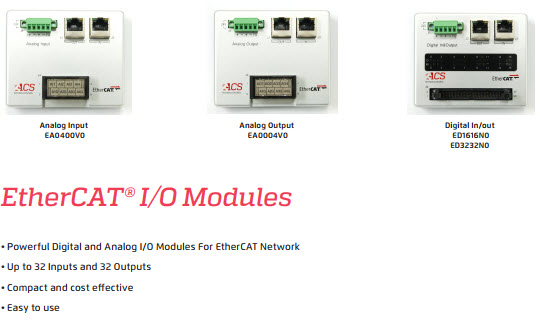
EtherCat Slave IO
Digital & Analog Input/Output devices that are based on EtherCat technology. I worked on a feature named Enhanced Link Detection that needs internal communication between MCU PIC24 and ET1100.